Symmetric semi-discrete optimal transport for mesh interpolation
Agathe Herrou
sous la direction de Nicolas Bonneel, Julie Digne et Bruno Lévy

- Introduction to optimal transport
- Symmetric semi-discrete optimal transport
- Alternating algorithm
- Optimization approach
- Mesh interpolation
- Conclusion
- Introduction to optimal transport
- Symmetric semi-discrete optimal transport
- Alternating algorithm
- Optimization approach
- Mesh interpolation
- Conclusion
Optimal transport
- Displacing mass under a cost minimization constraint
- Canonical examples: sand piles, mines and factories
 [Monge, 1781]
[Monge, 1781]

[Kantorovich, 1942]
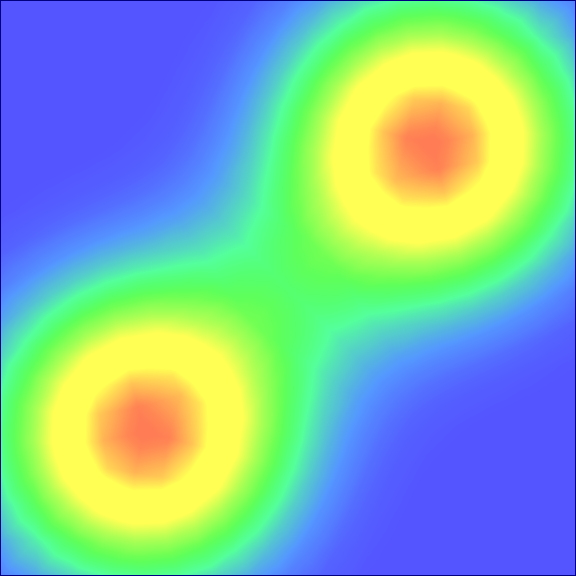
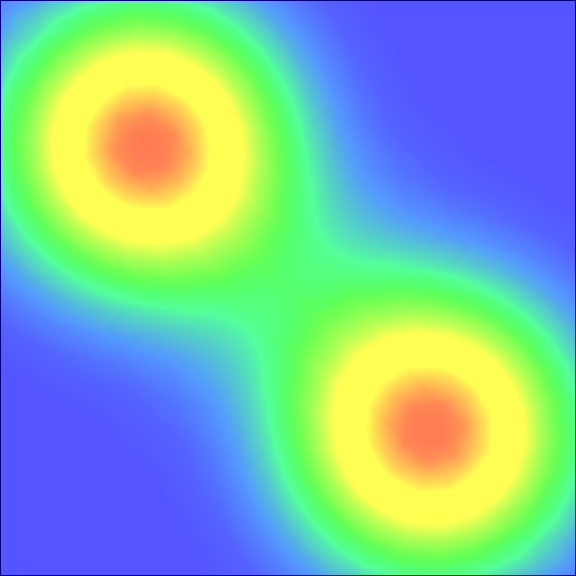
Displacement interpolation
- The transport plan induces an interpolation between measures
- More suited to some contexts than linear interpolation
Displacement (left) vs linear (right) interpolation
Semi-discrete optimal transport
Continuous source, discrete target


Voronoi diagram: all the sites have the same influence

Voronoi diagram: all the sites have the same influence

Limited capacities: adapt the assignment
Cell size increases as its weight decreases

Cell size increases as its weight decreases

Cell size increases as its weight decreases

Cell size increases as its weight decreases

Cell size increases as its weight decreases

Cell size increases as its weight decreases

Cell size increases as its weight decreases

Cell size increases as its weight decreases

Cell size increases as its weight decreases

Cell size increases as its weight decreases

Collectively adjust the weights so that the areas match the capacities

Collectively adjust the weights so that the areas match the capacities

Collectively adjust the weights so that the areas match the capacities

Collectively adjust the weights so that the areas match the capacities

Collectively adjust the weights so that the areas match the capacities

Collectively adjust the weights so that the areas match the capacities

Collectively adjust the weights so that the areas match the capacities

Collectively adjust the weights so that the areas match the capacities

Collectively adjust the weights so that the areas match the capacities

Power diagrams are equivalent to optimal transport plans [Aurenhammer et al, 1998]
Numerical computation


Cost of transporting a cell to its site

Constraint: difference between the prescribed masses and the actual masses

Weights act as Lagrange multipliers
$F$ is concave in $(\phi)$: stationary point is a maximum

Numerical algorithms
| Algorithm | Author(s) | Speed | Proven convergence speed | Requirements |
|---|---|---|---|---|
| Gradient ascent | Aurenhammer et al, 1998 | Slow | No | None |
| Multiscale | Mérigot, 2011 | Fast | No | None |
| Quasi-Newton (L-BFGS) | Lévy, 2014 | Fast | No | None |
| Newton - KMT | Kitagawa et al, 2017 | Very fast | Yes | No empty cells |
Alternating algorithms

Centroidal Voronoi Tessellations: Lloyd’s algorithm [Lloyd 1982, Du et al. 1999]




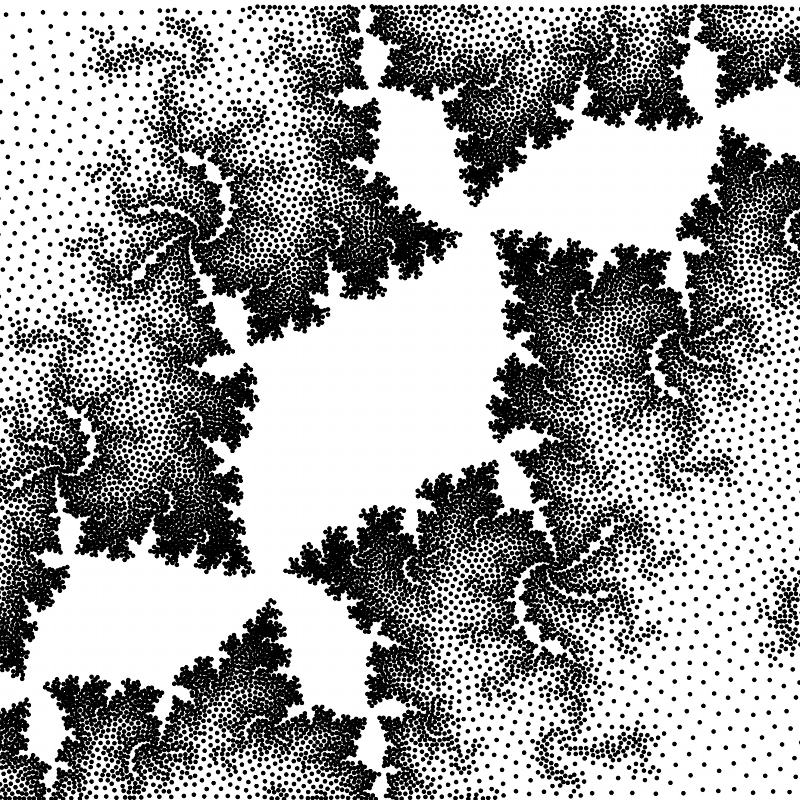
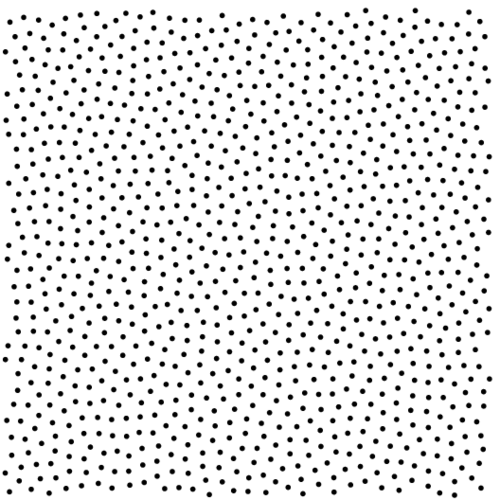
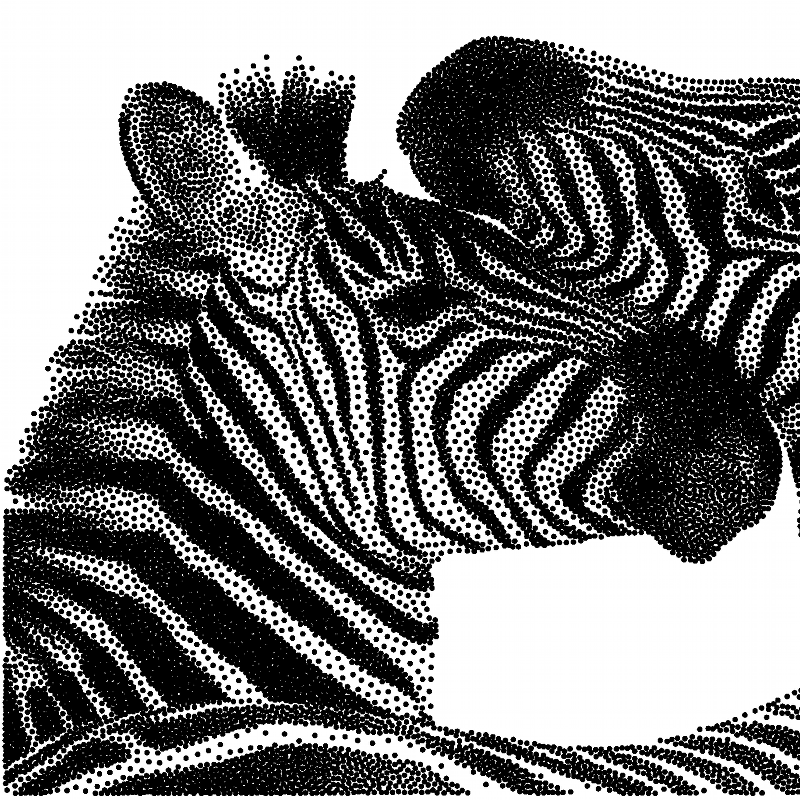
Blue Noise through Optimal Transport [de Goes et al. 2012]
Applications of semi-discrete optimal transport

Displacement interpolation [Lévy 2014]
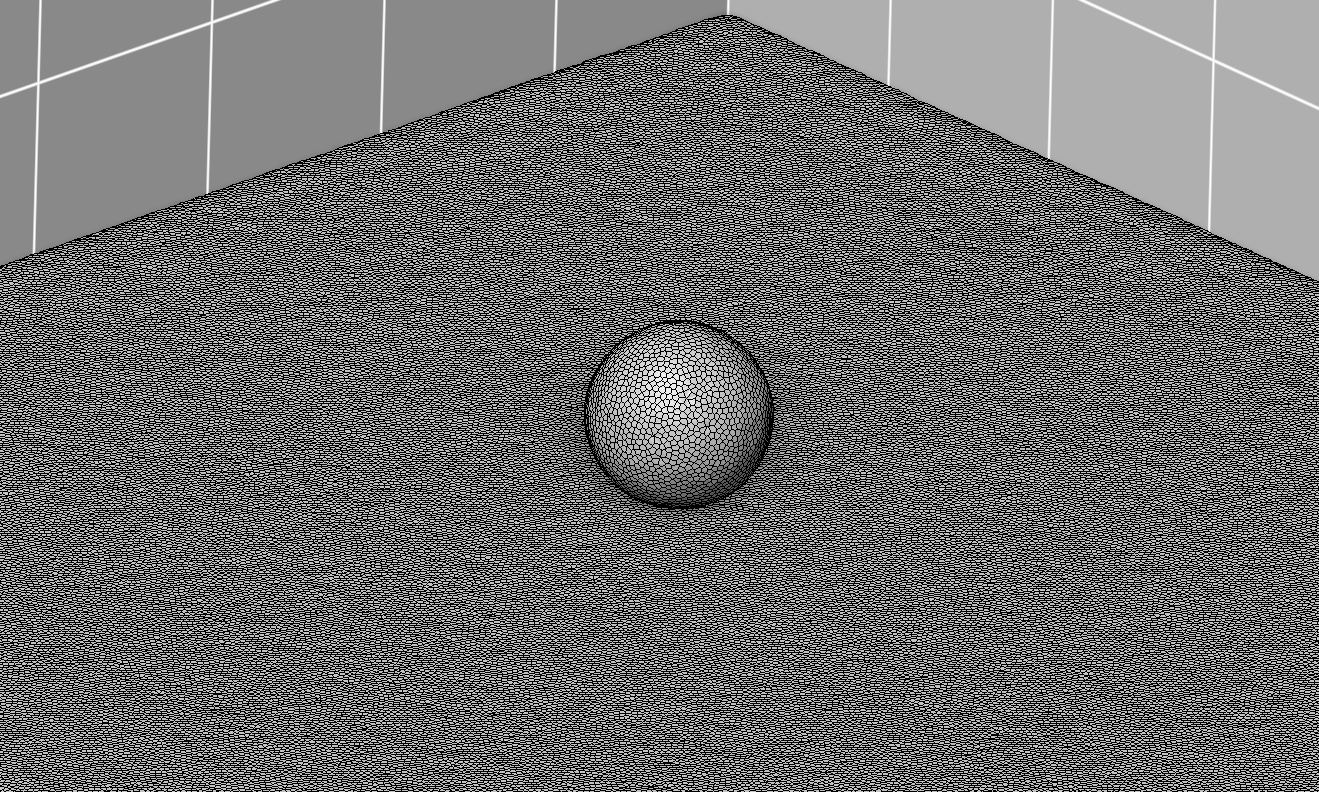
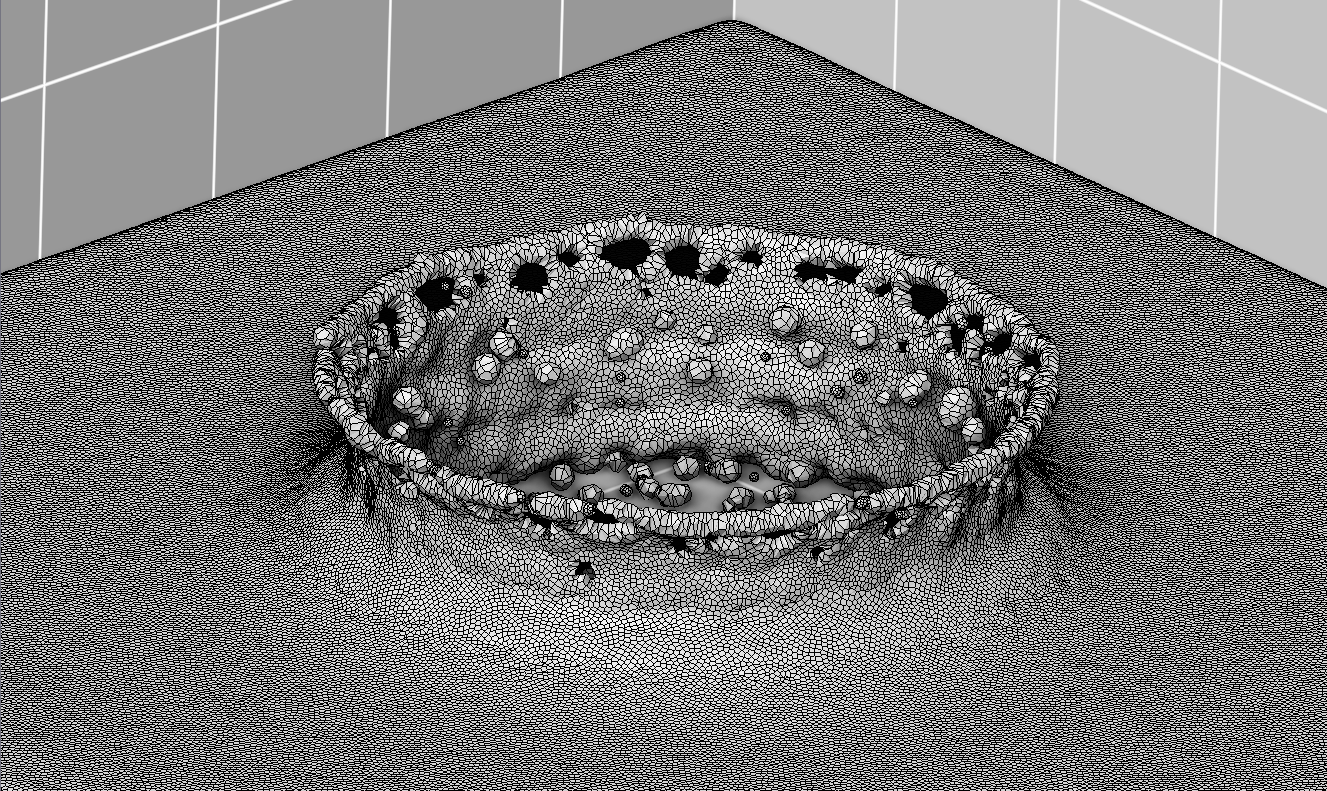
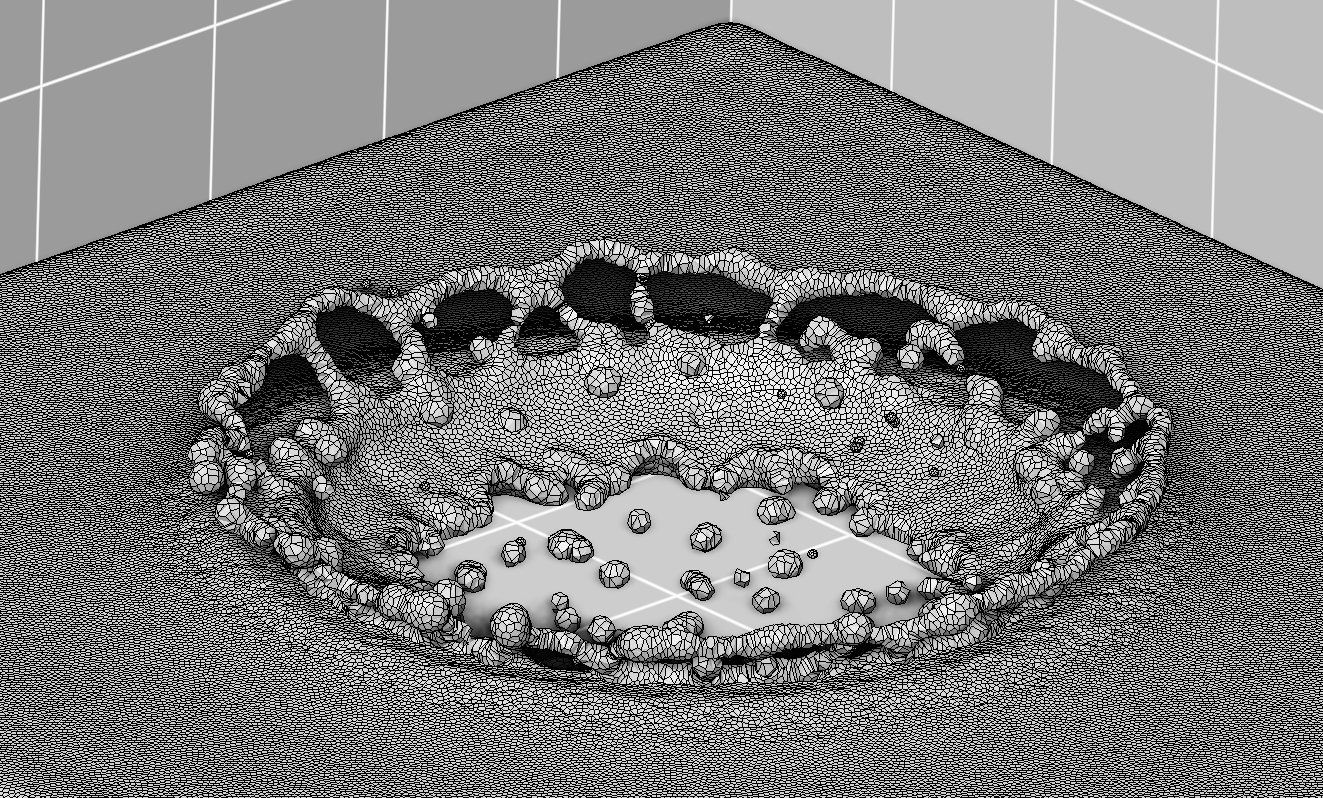
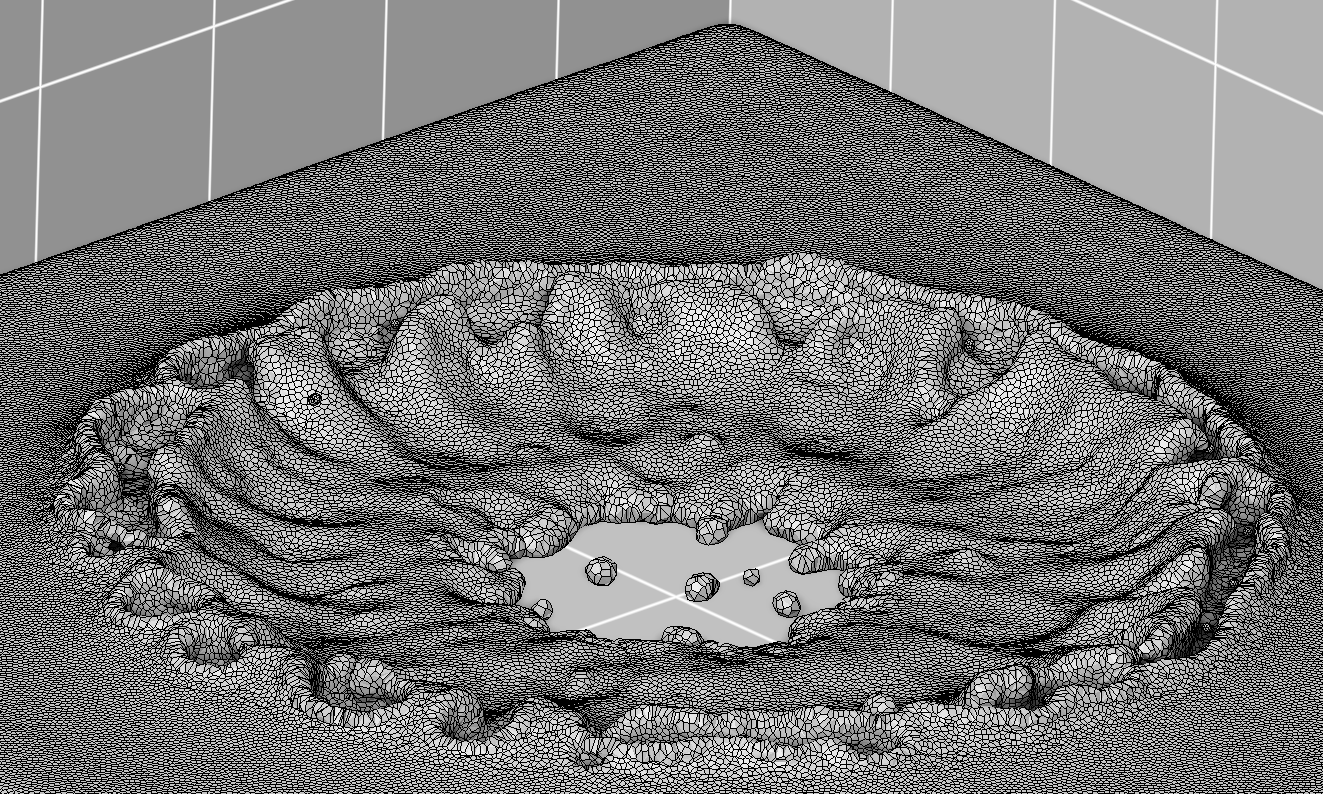
Fluid simulation [Lévy 2022]
Early universe reconstruction [Lévy et al 2021]

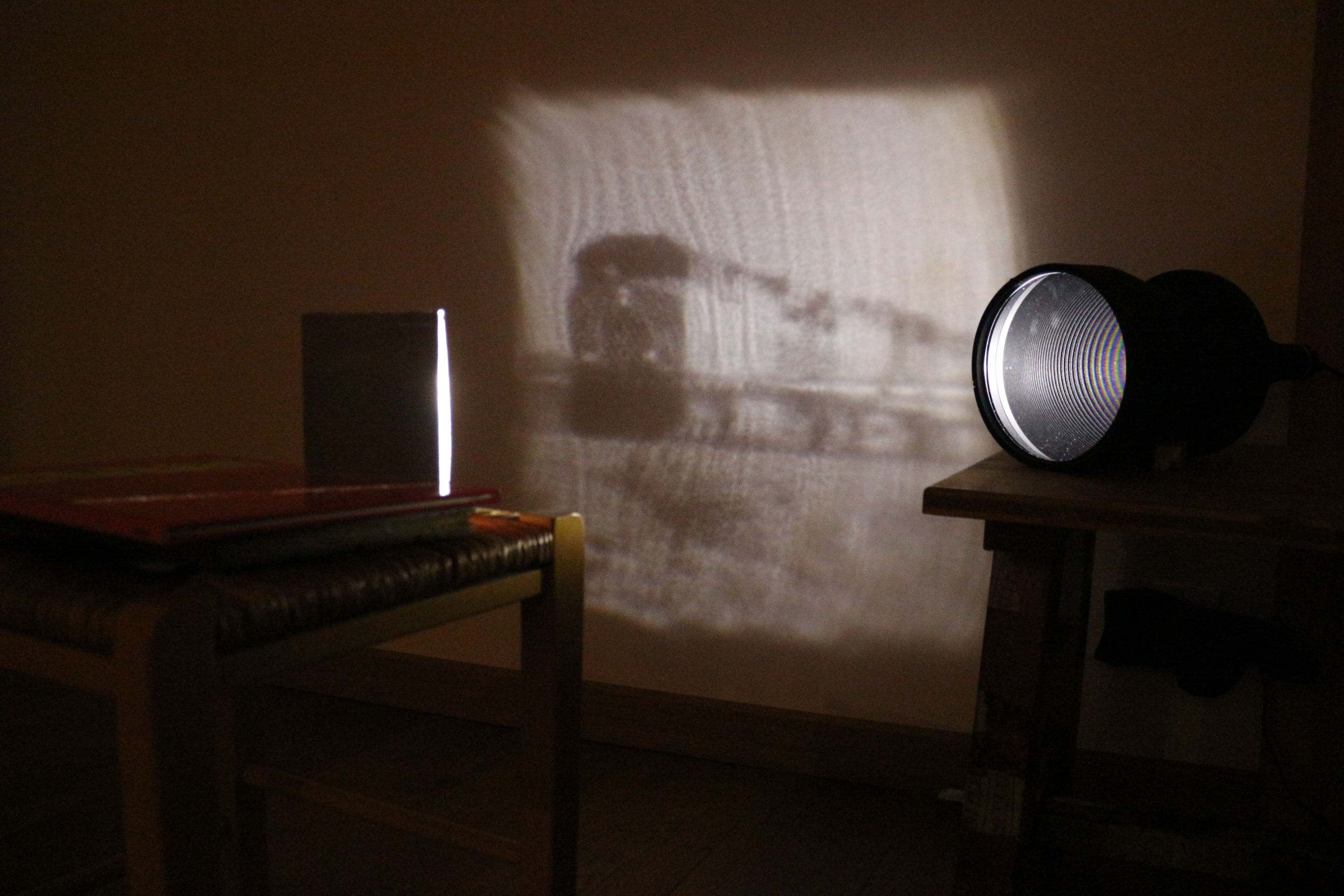
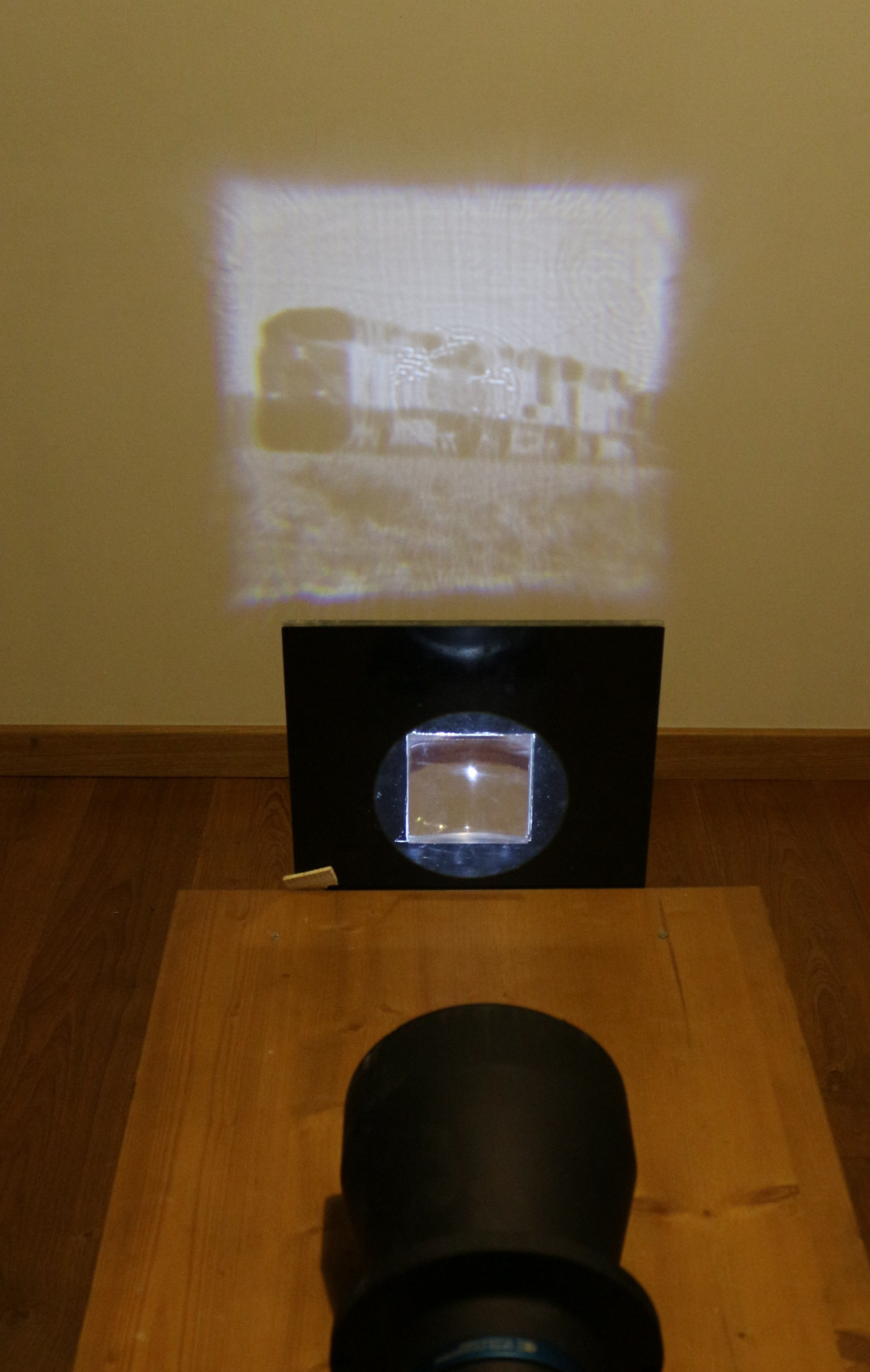
Light in Power: lenses and mirrors design [Mérigot et al 2017]
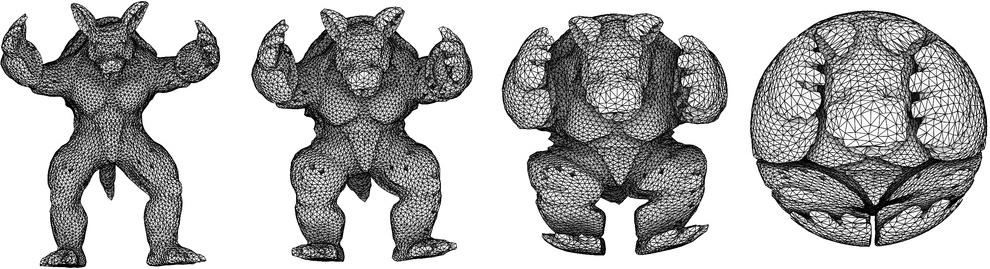
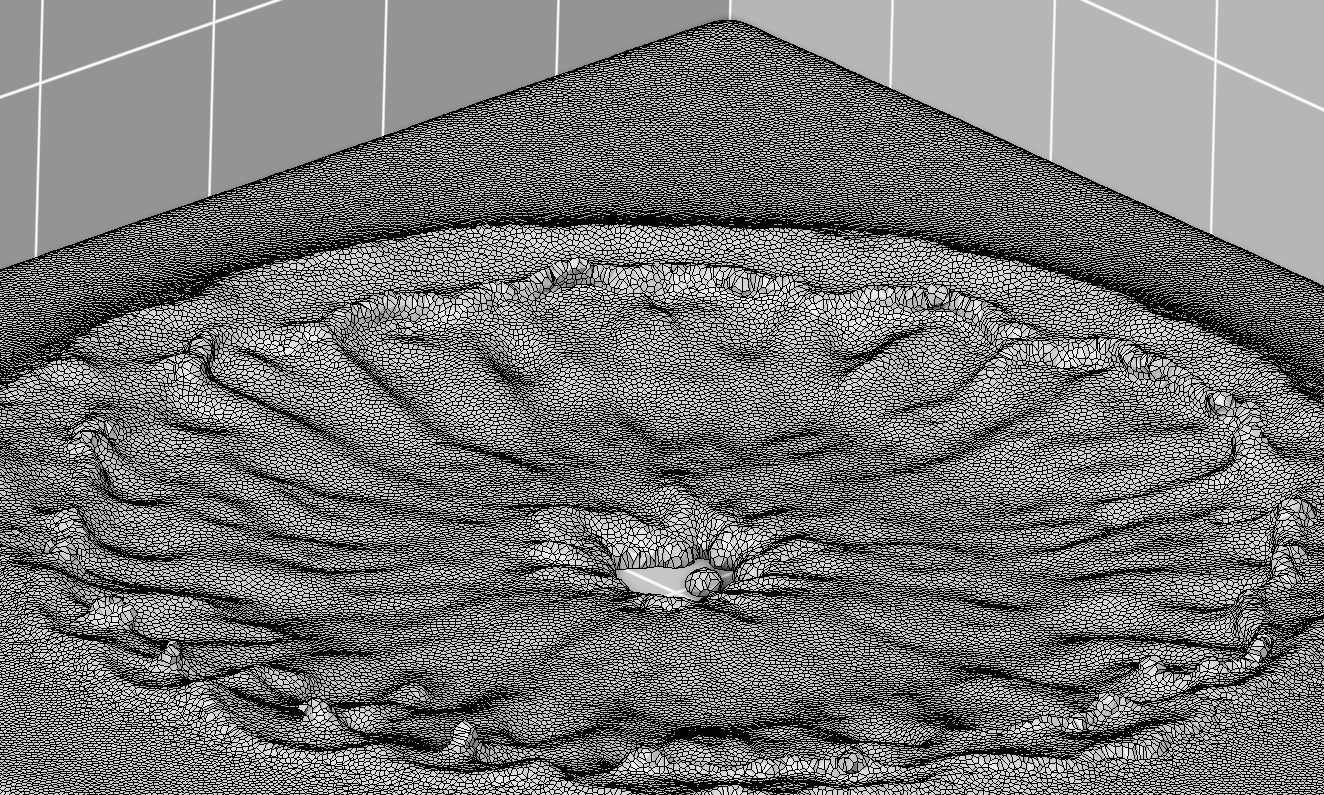
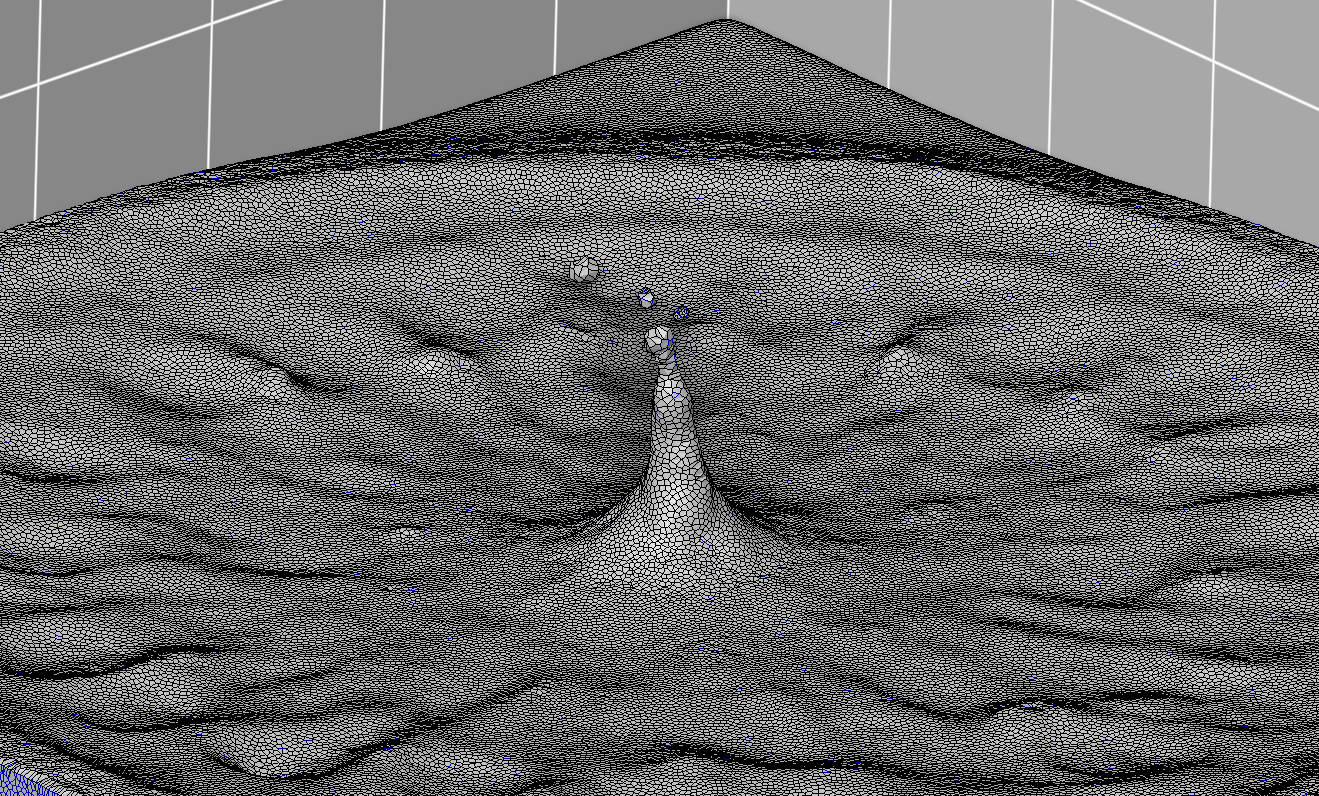
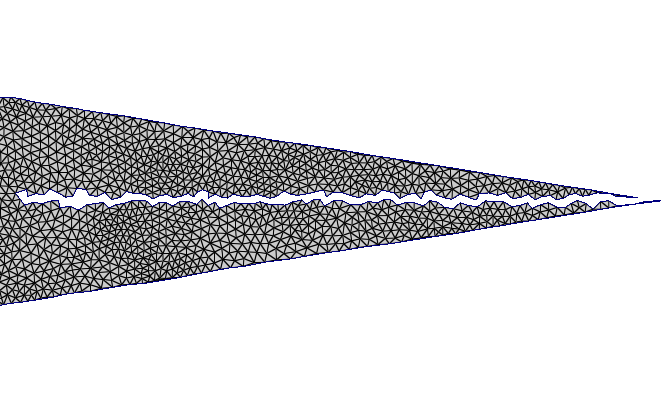
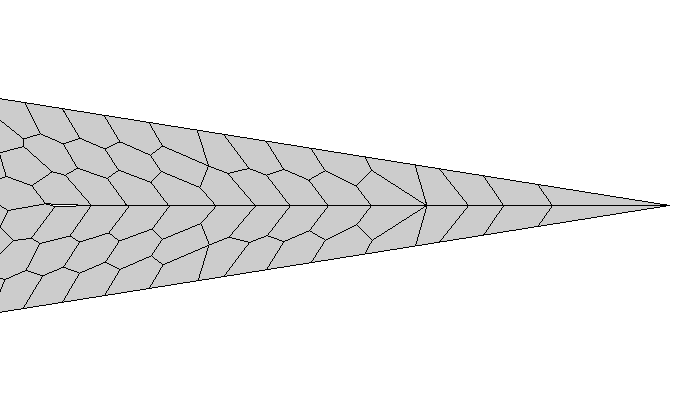
Approximation of displacement interpolation

Sample mesh
Compute transport

Compute barycenters

Compute mesh

Filter triangles
[Lévy 2014]
Limits


- Meshes play non-symmetric roles
- Irregular discontinuities
- Erodes original meshes
- Introduction to optimal transport
- Symmetric semi-discrete optimal transport
- Alternating algorithm
- Optimization approach
- Mesh interpolation
- Conclusion
Symmetrization of the semi-discrete transport problem
- $(Pow^\phi(x_i))_i$ is an optimal transport plan from $\mu$ to $\sum_i \delta_{x_i}$
- $(Pow^\psi(y_i))_i$ is an optimal transport plan from $\nu$ to $\sum_i \delta_{y_i}$


- $y_i$ are the barycenters of $Pow^\phi(x_i)$
- $x_i$ are the barycenters of $Pow^\psi(y_i)$
- Introduction to optimal transport
- Symmetric semi-discrete optimal transport
- Alternating algorithm
- Optimization approach
- Mesh interpolation
- Conclusion
Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(y_i)$ := barycenters of $Pow^\phi(x_i)$
$(\psi_i)$ := weights of OT from $\nu$ to $(y_i)$
$(x_i)$ := barycenters of $Pow^\psi(y_i)$

Alternating algorithm
while not converged do
$(y_i)$ := barycenters of $Pow^\phi(x_i)$
$(\psi_i)$ := weights of OT from $\nu$ to $(y_i)$
$(x_i)$ := barycenters of $Pow^\psi(y_i)$

Alternating algorithm
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$
$(y_i)$ := barycenters of $Pow^\phi(x_i)$

Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$
$(y_i)$ := barycenters of $Pow^\phi(x_i)$
Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(y_i)$ := barycenters of $Pow^\phi(x_i)$

Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$

Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$
$(y_i)$ := barycenters of $Pow^\phi(x_i)$
Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(y_i)$ := barycenters of $Pow^\phi(x_i)$

Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$

Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$
$(y_i)$ := barycenters of $Pow^\phi(x_i)$
Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(y_i)$ := barycenters of $Pow^\phi(x_i)$

Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$

Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$
$(y_i)$ := barycenters of $Pow^\phi(x_i)$

Alternating algorithm
$y_i$ := random sampling of $\mu$
while not converged do
$(x_i)$ := barycenters of $Pow^\psi(y_i)$
$(\phi_i)$ := weights of OT from $\mu$ to $(x_i)$
$(y_i)$ := barycenters of $Pow^\phi(x_i)$

Diagram correspondence




Computation times
| Sampling size | Algorithm | Computation time |
|---|---|---|
| 500 | Symmetric | 83s |
| 500 | Non-symmetric | 2s |
| 6500 | Non-symmetric | 79s |
- Introduction to optimal transport
- Symmetric semi-discrete optimal transport
- Alternating algorithm
- Optimization approach
- Mesh interpolation
- Conclusion
Constrained optimization
Lagrangian of the problem: \[\mathcal{L}(X, \Lambda) = F(X) + \Lambda \cdot B(X)\]where:
- $X$ is the vector of parameters
- $\Lambda$ is the Lagrange multiplier
- $F$ is the sum of transport objective functions
- $B$ is the vector of barycentric constraints
Optimality condition
Stationary point
$$
\begin{cases}
\nabla F(X) + J_B(X)^\top\cdot\Lambda = 0\\
B(X) = 0
\end{cases}
$$
Take a step and linearize $$ \begin{cases} \nabla F(X + \delta X) = \nabla F(X) + H_F(X)\delta X + o(\lVert \delta X \rVert)\\ B(X + \delta X) = B(X) + J_B(X)\delta X + o(\lVert \delta X \rVert) \end{cases} $$
Newton’s algorithm
\[ \begin{pmatrix} H_F(X) & J_B(X)^\top\\ J_B(X) & 0 \\ \end{pmatrix} \cdot \begin{pmatrix} \delta X \\ \Lambda \end{pmatrix} = - \begin{pmatrix} \nabla F(X) \\ B(X) \end{pmatrix} \]Derivatives computation

 Reynolds transport theorem [Reynolds 1903]
Reynolds transport theorem [Reynolds 1903]

Reynolds transport theorem [Reynolds 1903]

 Reynolds transport theorem [Reynolds 1903]
Reynolds transport theorem [Reynolds 1903]
Optimization results
- Computation of second-order derivatives of $F$ and first-order derivatives of $B$
- Verified derivatives using finite difference schemes
- Does not converge: $(x_i)_i$ and $(\phi_i)_i$ should not be considered independent?
- Introduction to optimal transport
- Symmetric semi-discrete optimal transport
- Alternating algorithm
- Optimization approach
- Mesh interpolation
- Conclusion
Point cloud interpolation
Diagram vertices association

Association of vertices at the intersection of 3 cells

Association of vertices at the intersection of 2 cells and the outside of the mesh


Association of vertices at the intersection of 3 cells splitting during transport
Mesh interpolations
 $\rightarrow$
$\rightarrow$

- Introduction to optimal transport
- Symmetric semi-discrete optimal transport
- Alternating algorithm
- Optimization approach
- Mesh interpolation
- Conclusion
Conclusion
- Symmetrization of the semi-discrete optimal transport problem
- Alternating heuristic to compute coupled transport plans
- Allows for precise mesh interpolation with relatively few points
- Clean capture of discontinuities
- Numerically verified derivatives of transport functionals and barycenters constraints
Future work
- Proof of convergence
- Proof of correspondence between the diagrams
- Different optimization method: fulfill barycentric constraints over the space of optimal transport plans
- Optimize $\lVert B\rVert$ over the set $$\{(x, \phi, y, \psi) \mid (Pow^\phi(x))\textrm{ and } (Pow^\psi(y)) \textrm{ are optimal transport plans}\}$$
Questions?
Alternating algorithm








More interpolations
Notations
- $X = (x_i, \phi_i, y_i, \psi_i)_i \in \mathbb{R}^{6N}$
- $Pow^\phi(x_i)$ the cell associated to $x_i$ in the power diagram of sites $(x)$ and weights $(\phi)$
- $K_i$ the number of edges of cell $Pow^\phi(x_i)$, $i_k$ the index of its $k$-th neighbor
- $\beta_{x,i}(X) = \int_{x\in Pow^\phi(x_i)} (x - y_i)d\mu(x)$ the $i$-th barycentric constraint
Reynolds' transport theorem
Let:
- $\Omega(t)$ be an integration domain depending on the real-valued parameter $t$, of boundary $\partial \Omega(t)$
- $f(x,t)$ be a function continuous on $\Omega(t)$ and integrable over $\partial \Omega(t)$, of derivative $\frac{\partial f}{\partial t}(x,t)dx$ integrable over $\Omega(t)$
- $\gamma(., t) : \mathbb{S}^1 \rightarrow \partial \Omega(t)$ be a parameterization of $\partial \Omega(t)$ defined on the unit circle $\mathbb{S}^1$, so that $\gamma(., t)$ is continuous and piecewise differentiable for all $t$, and $\gamma(\theta, .)$ is $\mathcal{C}^1$ $\forall\theta$
- and $n(x)$ is the outwards-pointing normal at $x \in \partial \Omega(t)$

Derivative of the centering constraint $\beta_{x,i}$ with respect to the position of the associated site $x_i$
$$\frac{\partial{\beta_{x,i}(X)}_\varepsilon}{\partial x_{i, \eta}} = \sum_{k=1}^{K_i}\frac{1}{\lVert x_i - x_{i_k}\rVert} \int_{x\in E_{i, i_k}} {(x - x_i)}_{\eta}{(x - y_i)}_\varepsilon d\mu(x)$$Derivative of the centering constraint $\beta_{x,i}$ with respect to the position of a neighboring site $x_{i_k}$
$$\frac{\partial{\beta_{x,i}(X)}_\varepsilon}{\partial x_{i_k, \eta}} = - \frac{1}{\lVert x_{i_k} - x_i}\rVert \int_{x\in E_{i, i_k}}{(x - x_{i_k})}_\eta{(x - y_i)}_\varepsilon d\mu(x)$$Derivative of the centering constraint $\beta_{x,i}$ with respect to the weight of the associated site $\phi_i$
$$\frac{\partial{\beta_{x,i}(X)}_\varepsilon}{\partial\phi_i}= \sum_{k=1}^{K_i}\frac{1}{2\cdot\lvert x_i - x_{i_k}\rVert} \int_{x\in E_{i, i_k}} {(x - y_i)}_\varepsilon d\mu(x)$$Derivative of the centering constraint $\beta_{x,i}$ with respect to the weight of a neighboring site $\phi_{i_k}$
$$\frac{\partial{\beta_{x,i}(X)}_\varepsilon}{\partial \phi_{i_k}} = - \frac{1}{2\cdot\lVert x_i - x_{i_k}\rVert} \int_{x\in E_{i, i_k}} {(x - y_i)}_\varepsilon d\mu(x)$$Derivative of the centering constraint $\beta_{x,i}$ with respect to the \changes{position} of the associated site in the opposite domain $y_i$
$$\frac{\partial {\beta_{x,i}(X)}_\varepsilon}{\partial y_{i, \eta}} = \begin{cases} - \mu(Pow^\phi(x_i)) \text{ if } \varepsilon = \eta \\ 0 \text{ otherwise} \end{cases}$$Second derivative of $\Phi$ with respect to the same site $x_i$ twice
$$\frac{\partial^2 F(X)}{\partial x_{i, \eta}^2} = 2\cdot\mu(Pow^\phi(x_i)) - 2\cdot \sum_{k=1}^{K_i} \int_{x \in E_{i, i_k}} \frac{{(x_{i, \eta} - x_\eta)}^2}{\lVert x_{i_k} - x_i\rVert} d\mu(x)$$Second derivative of $\Phi$ with respect to a cell's site $x_i$ and a neighboring site $x_{i_k}$
$$\frac{\partial^2F(X)}{\partial x_{i, \eta}\partial x_{i_k, \eta'}} = 2\cdot \int_{x \in E_{i, i_k}} \frac{{(x_{i_k} - x)}_{\eta'}\cdot{(x_i - x)}_\eta}{\lVert x_{i_k} - x_i\rVert} d\mu(x)$$Second derivative of $\Phi$ with respect to two different coordinates of the same site $x_i$
$$\frac{\partial^2F(X)}{\partial x_{i, 1} \partial x_{i, 2}}= 2\cdot \sum_{k=1}^{K_i} \int_{x \in E_{i, i_k}} \frac{{(x_i - x)}_1\cdot{(x_i - x)}_2}{\lVert x_{i_k} - x_i\rVert} d\mu(x)$$Second derivative of $\Phi$ with respect to a site $x_i$ and its corresponding site $y_i$ in the opposite domain
$$\frac{\partial^2F(X)}{\partial x_{i, \eta} \partial y_{i, \eta'}} = 0$$Second derivative of $\Phi$ with respect to a site $x_i$ and a neighboring site $y_{i_k}$ in the opposite domain
$$ \frac{\partial^2F(X)}{\partial x_{i, \eta} \partial y_{{i_k}, \eta'}} = 0$$Second derivative of $\Phi$ with respect to the same weight $\phi_i$ twice
$$\frac{\partial F(X)}{\partial \phi_i} = -\sum_{k=1}^{K_i} \frac{1}{2\cdot\lVert x_i - x_{i_k}}\rVert \int_{x\in E_{i, i_k}}d\mu(x)$$Second derivative of $\Phi$ with respect to a cell's weight $\phi_i$ and the weight $\phi_{i_k}$ of a neighboring cell
$$ \frac{\partial^2F(X)}{\partial\phi_i\partial\phi_{i_k}} = \frac{1}{2\cdot\lVert x_i - x_{i_k}\rVert} \int_{x\in E_{i, i_k}}d\mu(x)$$Second derivative of $\Phi$ with respect to a cell's weight $\phi_i$ and the weight $\psi_i$ of the corresponding cell in the opposite domain
$$\frac{\partial^2F(X)}{\partial\phi_i\partial\psi_i} = 0$$Second derivative of $\Phi$ with respect to the weight $\phi_i$ and the site's coordinates $x_i$ of a cell
$$\frac{\partial^2F(X)}{\partial\phi_i\partial x_{i, \eta}} = \sum_{k=1}^{K_i} \frac{1}{\lVert x_i - x_{i_k}\rVert} \int_{x\in E_{i, i_k}} {(x_i - x)}_\eta d\mu(x)$$Second derivative with respect to the weight $\phi_i$ of a cell and the coordinates $x_{i_k}$ of a neighboring cell's site
$$\frac{\partial^2F(X)}{\partial\phi_i\partial x_{i_k, \eta}} = -\frac{1}{\lVert x_i - x_{i_k}\rVert} \int_{x\in E_{i, i_k}} {(x_{i_k} - x)}_\eta d\mu(x)$$Second derivative with respect to the weight $\phi_i$ of a cell and the coordinates $y_i$ of the corresponding site in the opposite domain
$$\frac{\partial^2 F(X)}{\partial \phi_i\partial y_{i, \eta}} = 0$$Inverting the constraints and the objective function
- Optimize $\lVert B\rVert$ over the set $\{(x, \phi, y, \psi) \mid (Pow^\phi(x))\textrm{ and } (Pow^\psi(y)) \textrm{ are optimal transport plans}\}$
- Optimizing over the set of optimal transport plans: the value of $(x)$ determines the optimal weights $\phi^*(x)$
- Cancel $B(x, \phi^*(x), y, \psi^*(y))$ using Newton's method or minimize $\lVert B(x, \phi^*(x), y, \psi^*(y)) \rVert$.
- Parameter set is reduced to $(x, y)$.